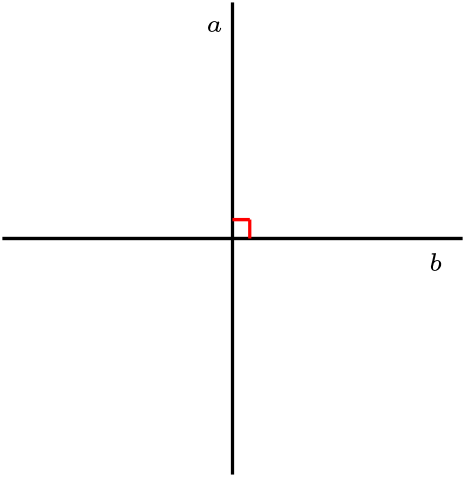
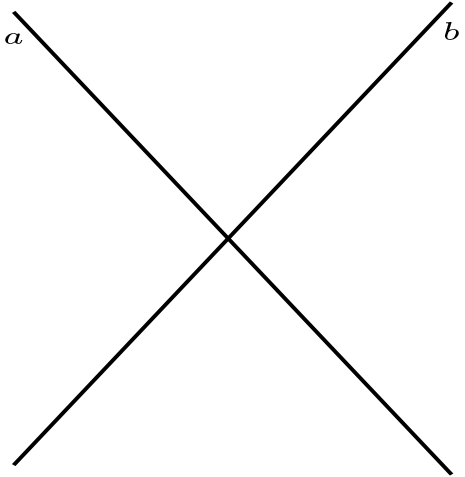
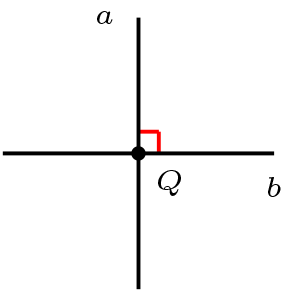
Para enunciar los axiomas del plano métrico, consideremos \(\Pi=(\mathcal{P},\ \mathcal{L}, \ \mathcal{I}, \ \perp)\) donde \(\mathcal{P}\) es el conjunto de puntos, \(\mathcal{L}\) es el conjunto de rectas, \(\mathcal{I}\) una relación de incidencia entre puntos y rectas y \(\perp\) una relación ortogonalidad entre rectas.
\(a \perp b\)\(a \not \perp b\)
Ahora veamos los tres tipos de axiomas (afines, perpendicular y colineación).
Subsección 3.1.3 Simetrías en el plano.
¶
Definición 3.1.2
Sea \(R \in \text{Aut}(\Pi)\text{,}\) se dice que \(R\) es una simetría de eje \(l\) si y sólo si
\(R \neq \text{Id}.\)
\(R\) tiene orden dos.
\(R\) fija a todos los puntos de una recta \(l\) (eje de simetría).
Notación
\(R_l\) es la simetría de eje \(l\text{.}\)
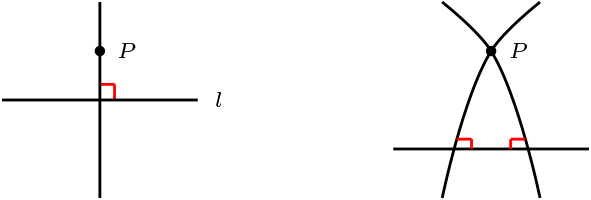
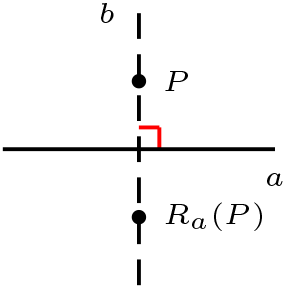
Visualización de una simetría: Sean \(P \in \mathcal{P}\) y \(a, b \in \mathcal{L}\)
-
Si \(P \mathcal{I} a, \text{ entonces } R_{a}(P)=P\)
-
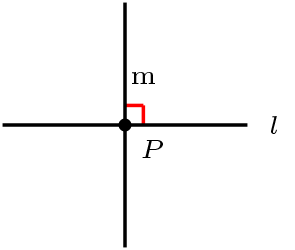
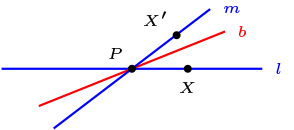
Si \(P \not\mathcal{I} a\text{,}\) entonces existe \(b \perp a\text{,}\) tal que \(P \mathcal{I} b\text{,}\) pero \(\{Q\} = a\cap b\text{,}\) luego \(b\) es única recta tal que \(Q\mathcal{I}b\text{.}\)
Pero \(R_a(Q)=Q\text{,}\) \(R_a(P) \mathcal{I}R_a(b)\text{,}\) \(Q \mathcal{I}R_a(b)\text{,}\) y como \(R_a(a) \perp R_a(b) \text{,}\) por ello \(R_{a}(b)=b\text{,}\) de lo cual tenemos que \(R_{a}(P)\mathcal{I}b\text{.}\)
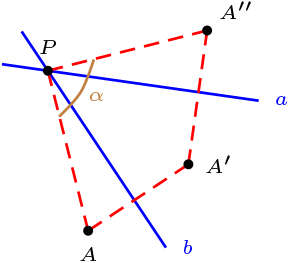
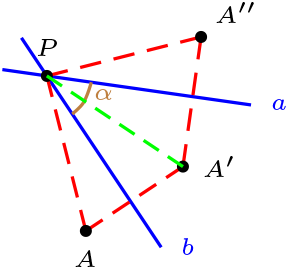
Rotaciones:
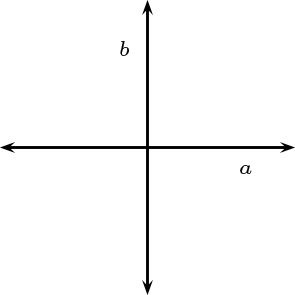
Sea \(\sigma \in \text{Aut}(\Pi)\text{,}\) se dice que \(\sigma\) es una rotación si y sólo si existen \(R_{a}, \ R_{b} \in \text{Aut}(\Pi)\text{,}\) tal que \(a \cap b = \{ P \}\) y \(\sigma = R_{a} \circ R_{b}\text{.}\)
\(P\) se denomina centro de rotación.
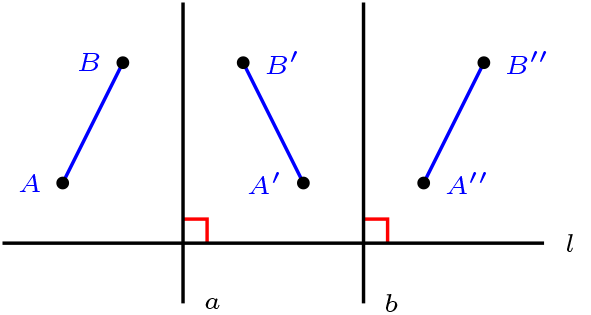
El ángulo de rotación viene dado por \(\alpha=\sphericalangle APA''\) donde $\sigma(A)=A''
En plano real, el ángulo de una rotación siempre es doble del ángulo entre las rectas.
Traslaciones:
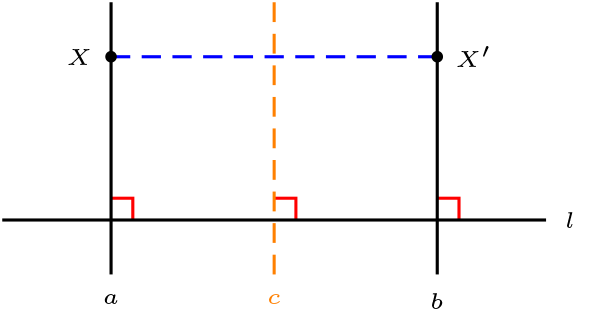
Sea \(t \in \text{Aut}(\Pi)\text{.}\) Diremos que \(t\) es traslación a lo largo de \(l\) si y sólo si existe \(a,b \in \mathcal{L}\) tales que \(t=R_{a} \circ R_{b}, a \cap b = \varnothing\) y \(a \perp l \wedge b \perp l\) (\(R_{a},R_{b}\) simetría).
Simetría Puntual
Sea \(H_P \in \text{Aut}(\Pi)\text{.}\) Diremos que \(H_P\) es una simetría Puntual si y sólo si existen \(a,b \in \mathcal{L}\) tales que \(H_{P}=R_{a} \circ R_{b}\text{,}\) \(a \cap b= \{P\} \) y \(a \perp b\)