
Teorema 4.9.1
Sea \(f: X \rightarrow X\) una dilatación en el Espacio Afín \((V,X,\cdot)\text{,}\) entonces \(f\) esta completamente determinada si se conoce la imagen de dos puntos.
Sea \((V,X,\cdot)\) un espacio afín, \(dim (X) \geq 2\) y la función \(f:X\rightarrow X\) biyectiva.
Recordemos que \(f\) es una dilatación si y sólo si, es una colineación que para todo \(l\) recta, \(f(l)\parallel l\)
Note que la identidad es una dilatación.
Sea \(f: X \rightarrow X\) una dilatación en el Espacio Afín \((V,X,\cdot)\text{,}\) entonces \(f\) esta completamente determinada si se conoce la imagen de dos puntos.
Sea \(f\) una dilatación en el espacio afín \((V,X,\cdot)\text{.}\)
Se dice que \(f\) es una Traslación si y sólo si , \(f\) no tiene puntos fijos o \(f=Id\text{.}\)
Se dice que \(f\) es una Homotecia si y sólo si , \(f\) tiene puntos fijos y el se llama centro de la homotecia o \(f=Id\text{.}\)
Una traslación esta completamente determinada si se conoce la imagen de un punto.
Sea f una traslación y \(a \in X\) tal que \(f(a)=a'\) y consideremos \(x \in X\text{.}\) de modo que \(x \ \not \in \ l_{aa'}\text{.}\)
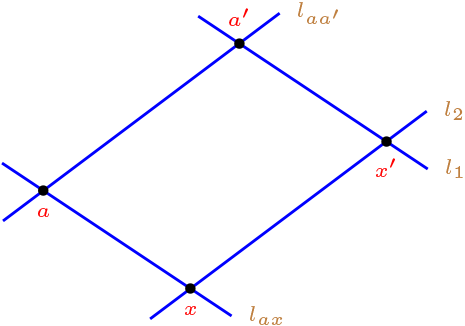
Definimos: \(l_2\) paralela a \(l_{aa'}\) y \(x \in \ l_2\)
\(l_1\) paralela a \(l_{ax}\) y \(a' \ \in \ l_1\)
Por lo tanto \(l_1 \cap l_2 = \{ x' \}\) es la imagen de \(x\text{.}\)
Al conocer la imagen de dos puntos, \(f\) esta completamente determinada.
Por argumentos similares a los realizados en el primer capitulo tenemos que las únicas traslaciones son \(t_{\overrightarrow{v}}\) con \(\overrightarrow{v}\in V\text{.}\)
Sea \(f: X \rightarrow X\) una homotecia de centro \(c\in X\text{,}\) entonces existe \(k\in \mathbb{K}\) tal que
Dado \(x \in X\text{,}\) distinto de \(c\text{,}\) luego \(f(x)\) no esta fijo, por ello tenemos que las rectas \(l_{cx} \parallel l_{cf(x)}\text{,}\) de este modo los vectores directores son linealmente dependiente \(\{\overrightarrow{cx}, \overrightarrow{cf(x)} \}\text{.}\)
Por lo anterior existe \(k \in \mathbb{K}\text{,}\) tal que \(\overrightarrow{cf(x)}=k \overrightarrow{c x}\text{.}\)
De este modo tenemos que \(f(x)= (k\overrightarrow{cx})\cdot c \text{.}\)
Ahora bien dado \(y \in X\text{,}\) tenemos que \(f(x)= (\alpha \overrightarrow{cy})\cdot c \text{,}\) pero notemos que \(l_{xy} \parallel l_{f(x)f(y)}\text{,}\) de este modo los vectores directores son linealmente dependiente \(\{\overrightarrow{xy}, \overrightarrow{f(x)f(y)} \}\text{,}\) de lo cual tenemos \(\alpha =k\)
\(M_{(c,k)}\) es la homotecia de razón \(k\) y centro \(c\text{.}\)
Sea \((V,X,\cdot)\) un espacio afín entonces
es un grupo, llamado de las homotecia de centro \(c\)
Notemos solamente que
y
Describa las homotecia de centro \(c\) y razón \(k\) en espacio vectorial afín.
\((V,V,\cdot)\text{,}\) el espacio vectorial afín,
Sea \(f\) una dilatación en espacio afín \((V,X,\cdot)\text{,}\) entonces existe \(\alpha \in \mathbb{K}\) tales que para todo \(x,y\in \text{,}\) se tiene
\(\alpha\) se llama la razón de la dilatación
Sea \(f\) una dilatación.
i) Si \(f\) es una traslación, luego \(f=t_{\overrightarrow{v}} \)
Lo cual se tiene que \(\alpha =1\text{.}\)
ii) Si \(f\) es una homotecia, luego \(f=M_{(c,k)} \)
Lo cual se tiene que \(\alpha =k\text{.}\)
Sean \(f_1, f_2\) una dilatación en espacio afín \((V,X,\cdot)\text{,}\) de razón \(k_1, k_2\) respectivamente, entonces
\(f_1\circ f_2\) tiene razón \(k_1k_2\)
\(f_1^{-1}\) tiene razón \(k_{1}^{-1}\)
Sea \((V,X,\cdot)\) un espacio afín, entonces
Sea \((V,X,\cdot)\) un espacio afín.
Una dilatación esta completamente determinada si se conoce la imagen de un punto y la razón de la dilatación.
Sea \(\sigma \) una dilatación de razón \(k\) tal que \(\sigma(c)=c'\)
Primer Caso, si \(\sigma \) es un traslación, \(k=1\text{,}\) y estamos listo.
Segundo Caso, si \(\sigma\) es una rotación
Pero tenemos que determinar el centro
y la razón esta completamente determinado.
Sea \((V,X,\cdot)\) un espacio afín y \(\sigma \) una dilatación tal que \(\sigma(x)=z\) y de la razón \(k\text{,}\) entonces
\(\sigma \) una dilatación tal que \(\sigma(x)=z\) y de la razón \(k\text{.}\) Luego tenemos que
es una dilatación, que tiene un punto fijo y es de razón \(k\text{,}\) por lo tanto es una homotecia de razón \(k\)
de lo cual tenemos
Sea \((V,X,\cdot)\) un espacio afín, entonces para todo \(a,b \in V\text{,}\) para todo \(c\in X\) y para todo \(r, s\in K^*\)
Sean \(a,b \in V\text{,}\) \(c\in X\) y \(r, s\in \mathbb{K}^*\text{.}\)
De lo cual obtenemos que la dilatación
tiene un punto fijo y la razón es el producto de las razones, luego es \(rs\text{.}\)
despejando obtenemos
Sea \((V,X,\cdot)\) un espacio afín, entonces
Determinar condiciones para \(c,d\in X\) distintos y \(r, s\in \mathbb{K}^*\) de modo que \(M_{(c,r)}\circ M_{(d,s)}\) es una traslación.